|
|

|

|
| e-Pub |
Section: New Results
Motion-planning in human-populated environment
We study new motion planning algorithms to allow robots/vehicles to navigate in human populated environment, and to predict human motions. Since 2016, we investigate several directions exploiting vision sensors : prediction of pedestrian behaviors in urban environments (extended GHMM), mapping of human flows (statistical learning), and learning task-based motion planning (RL+Deep-Learning) . These works are presented here after.
Urban Behavioral Modeling
Participants : Pavan Vasishta, Anne Spalanzani, Dominique Vaufreydaz.
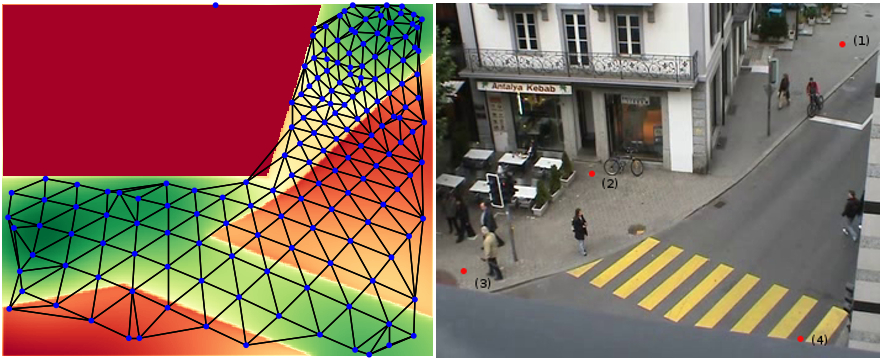
The objective of modeling urban behavior is to predict the trajectories of pedestrians in towns and around car or platoons (PhD work of P. Vasishta). In 2017 we proposed to model pedestrian behaviour in urban scenes by combining the principles of urban planning and the sociological concept of Natural Vision. This model assumes that the environment perceived by pedestrians is composed of multiple potential fields that influence their behaviour. These fields are derived from static scene elements like side-walks, cross-walks, buildings, shops entrances and dynamic obstacles like cars and buses for instance. This work was published in [95], [94]. In 2018, an extension to the Growing Hidden Markov Model (GHMM) method has been proposed to model behavior of pedestrian without observed data or with very few of them. This is achieved by building on existing work using potential cost maps and the principle of Natural Vision. As a consequence, the proposed model is able to predict pedestrian positions more precisely over a longer horizon compared to the state of the art. The method is tested over legal and illegal behavior of pedestrians, having trained the model with sparse observations and partial trajectories. The method, with no training data (see. Fig. 9.a), is compared against a trained state of the art model. It is observed that the proposed method is robust even in new, previously unseen areas. This work was published in [36] and won the best student paper of the conference.
|
Learning task-based motion planning
Participants : Christian Wolf, Jilles Dibangoye, Laetitia Matignon, Olivier Simonin, Edward Beeching.
Our goal is the automatic learning of robot navigation in human populated environments based on specific tasks and from visual input. The robot automatically navigates in the environment in order to solve a specific problem, which can be posed explicitly and be encoded in the algorithm (e.g. recognize the current activities of all the actors in this environment) or which can be given in an encoded form as additional input. Addressing these problems requires competences in computer vision, machine learning, and robotics (navigation and paths planning).
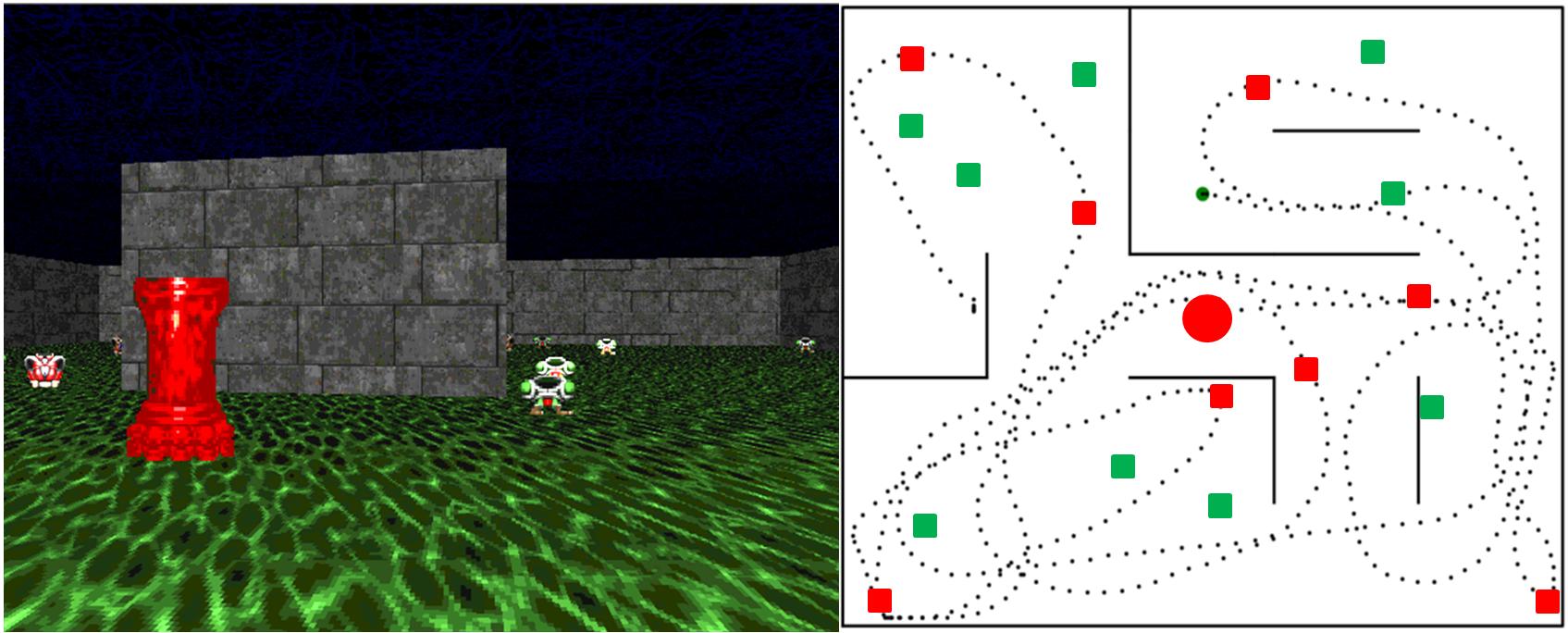
We started this work in the end of 2017, following the arrival of C. Wolf, through combinations of reinforcement learning and deep learning. The underlying scientific challenge here is to automatic learn representations which allow the agent to solve multiple sub problems require for the task. In particular, the robot needs to learn a metric representation (a map) of its environment based from a sequence of ego-centric observations. Secondly, to solve the problem, it needs to create a representation which encodes the history of ego-centric observations which are relevant to the recognition problem. Both representations need to be connected, in order for the robot to learn to navigate to solve the problem. Learning these representations from limited information is a challenging goal. This is the subject of the PhD thesis of Edward Beeching who started on October 2018, see illustration Fig. 9.b.
Human-flows modeling and social robots
Participants : Jacques Saraydaryan, Fabrice Jumel, Olivier Simonin, Benoit Renault, Laetitia Matignon, Christian Wolf.
|
In order to deal with robot/humanoid navigation in complex and populated environments such as homes, we investigate since 2 years several research avenues :
-
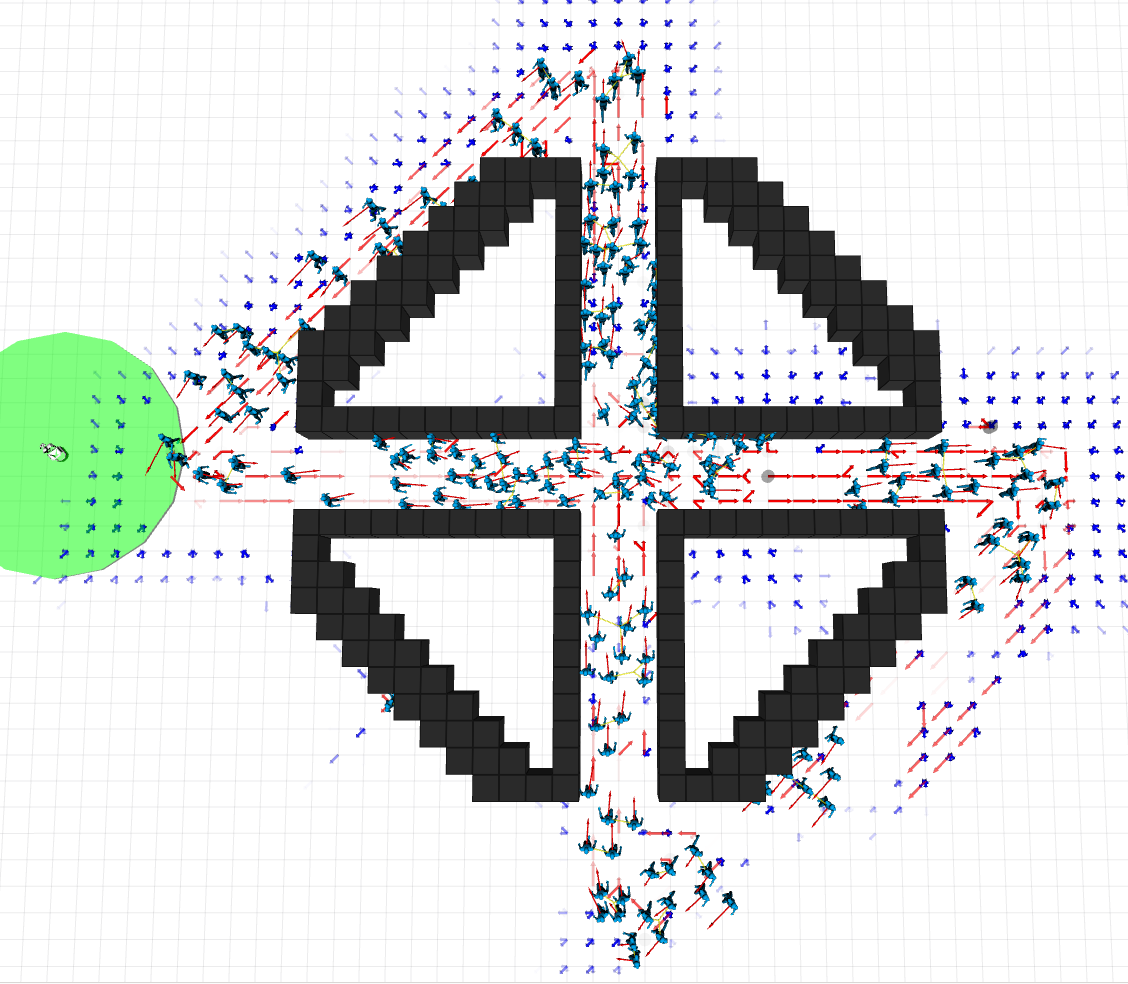
Mapping humans flows. We defined a statistical learning approach (ie. a counting-based grid model) exploiting only data from robots embedded sensors. See illustration in Fig. 10.a and publication [66].
-
Path-planning in human flows. We revisited the A* path-planning cost function under the hypothesis of the knowledge of a flow grid. See publication [66].
-
In 2018 we started to study NAMO problems (Navigation Among Movable Obstacles) by considering populated environments and muti-robot cooperation. After his Master thesis on this subject, Benoit Renault started a PhD in Chroma focusing on the extension of NAMO algorithms to such dynamic environments.
-
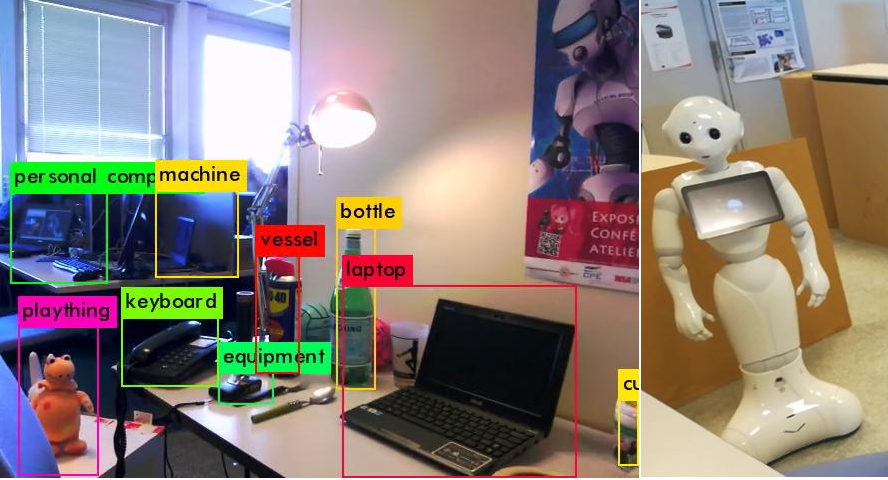
RoboCup competition. In the context of the RoboCup international competition, we created the 'LyonTech' team, joining members from Chroma (INSA/CPE/UCBL). We investigated several humanoid tasks in home environments with our Pepper robot : social aware architecture, decision making and navigation, deep-learning based human and object detection (see Fig. 10.b), human-robot interaction. In July 2018, we participated for the first time to the RoboCup and reaching the 5th rank of the SSL league (Pepper@home). We also published our social-aware architecture to the RoboCup Conference [31]. In October 2018, we qualified for the next final phase of RoboCup SSL (Pepper) to be organized on July 2019, in Sydney.